3. ONE POLE, ONE ZERO
About This System
If we add a zero to the single time constant (single pole) system, we often get a high pass characteristic, although it depends on where you place the zero. The transfer function is set up here to give unit gain at infinite frequency.
numerator has same degree as denominator
Here are two systems described by transfer functions like this when the zero is at the origin (z = 0). are below, where the electrical system output is the resistor voltage in response to the voltage input, and the thermal system output is the heat flow rate in response to ambient temperature.
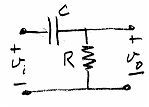
RC highpass: input vi, output is resistor voltage vo
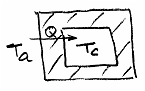
thermal chamber: input Ta (ambient temperature), output Q (heat flow rate)
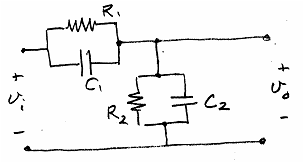
The circuit below allows the zero to be in the left half plane, instead of stuck at the origin:
Putting the zero in the right half plane generally requires an active element, like an op amp, in the circuit.
Animated Response
For the animation, we'll start with a large negative value of p and sweep it to the origin and just into the right half plane. In the right half plane, the impulse and step responses show the system to be unstable, so there is no defined frequency response. I have provided three choices for the location of the zero:
z = -3
and
z = 0
and
z = +3
. Click them to see the animations, and leave the animation window open as you read this section. Drag the animation slider back and forth with your mouse to get different parameter values and change all the graphs together.
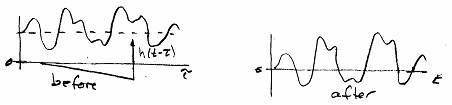
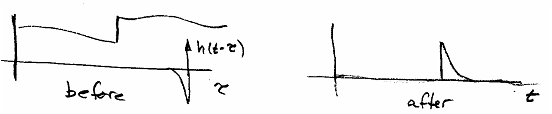
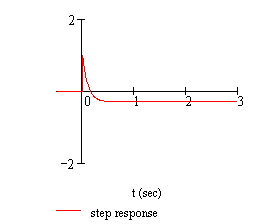
This is more interesting than the single pole, no zero systems - there's a step discontinuity in g(t) at time zero, and a variety of system behaviours. Think about these ones:
* Place the zero on the origin (
z = 0
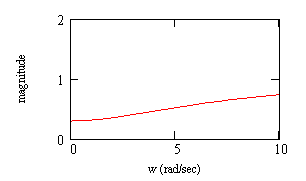
). The system blocks DC, and attenuates a smaller range of frequencies when the pole is closer to the origin (i.e. longer time constant) than when it is farther away. Final value of the step response is zero; it responds to a change in the input, but sags back to zero if the input is steady.
* Also when the zero is at the origin (
z = 0
), the impulse response (not shown) contains an impulse itself. To see this, mentally differentiate the step response. The area of the impulse has opposite sign from the area of the decaying exponential that follows it. This is because the DC gain for this system is zero, so the total area of the impulse response must be zero.
* Place the zero in the left half plane (e.g., at
z = -3
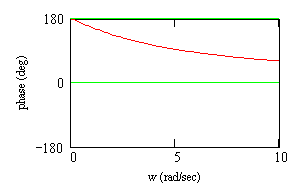
). When the pole is to the left of the zero, low frequencies are cut, though not reduced to zero. The phase shift is zero for DC and infinite frequencies, and positive in between. When the pole is to the right of the zero, low frequencies are boosted, and the phase shift is negative. Final value of the step response?
* Now place the zero in the right half plane (e.g., at
z = +3
). What happens in this case when the pole and zero are the same distance from the origin, but on opposite sides? (This is called an "all pass filter".) Final value of step response?
Uses
In electronics, this type of simple highpass filter with z = 0 is often used:
-
to remove DC when a desired signal is superimposed on a DC bias;
-
to detect edges or sudden changes in the input, because the step response is a short, decaying pulse; rectifying the filter output gives a positive pulse whenever there is a jump, positive or negative, in the input;.
If the zero z is negative, the system is sometimes used to obtain the small positive or negative phase shift that may be necessary to ensure stability of a feedback control system. It is called a lead circuit (if the zero is closer to the origin than the pole) or a lag circuit (if the pole is closer than the zero), since it gives a small positive or negative phase shift.
=============================================================
Work Area
Here you can make your own animation, with your own choice of parameters.
(number of frames in animation)
FRAME is the frame counter variable
the time constant in seconds
<== you set the zero location here - it doesn't have to be 0, and can even be in the right half plane
step response, also written as e-t/t(1+tz)-tz;
note the forced causality by (t£0)
frequency response; set to zero if unstable
plot ranges
one pole, one zero
.