SARA/CAATI Sonar Technology
SARA/CAATI sonar technology was researched and developed to provide high-resolution imaging and bathymetry capability in a small package suitable for deployment on small autonomous underwater vehicles. This sonar technology proved very successful for a wide variety of applications and is the subject of a patent and three license agreements. The earliest agreement with Benthos resulted in a commercial product known as C3D that is being sold as an imaging swath bathymetry sonar.
This patented sonar technology consists of both a hardware configuration and a software signal processing methodology. The hardware configuration consists of a vertical stack of six horizontally long array elements coupled to a fully coherent multi-channel transmitter/receiver. The physical arrangement of the transmit/receive transducer is such that it can be installed wherever an ordinary side-scan transducer can, yet with the result of obtaining both imagery and bathymetry instead of just imagery. Further, the bottom imagery obtained is not contaminated by surface or water-column targets as it is with side-scan sonars.
The signal processing methodology was developed to estimate angles of arrival of multiple signals received by a small aperture array. Software based on this methodology can accurately estimate multiple angles of arrival in the presence of noise and glint. Previous methods for angle of arrival estimation in the transient signal environment of bathymetric interferometric sonars could estimate only one angle and therefore were ineffective in multi-path environments. Our methodology treats multi-path signals like direct signals and estimates both; therefore, not only do we estimate the direct arrival accurately but we also get a good picture of the entire acoustic environment. The methodology includes a glint filter that effectively removes samples that are distorted by glint (large phase variations across the array caused by unfavourable constructive and destructive interference of signals from multiple scatters). The methodology allows the estimation to be done with transient signals, and a trade-off of resolution and estimation accuracy can be made.
The potential impact of this sonar technology was recognised early and a decision was made by SFU to obtain a patent. Results obtained with our experimental sonar have been published in a number of conferences. As further evidence of the effectiveness and significance of this core sonar technology data obtained with the Benthos C3D version was featured on the front cover of the June 2005 issue of Sea Technology. Sea Technology is one of the industry’s major magazines covering all aspects of ocean technology. The June issue was dedicated to sea floor mapping.
SARA 3D Sidescan Mapping Example (Early
version of the sonar technology called SARA)
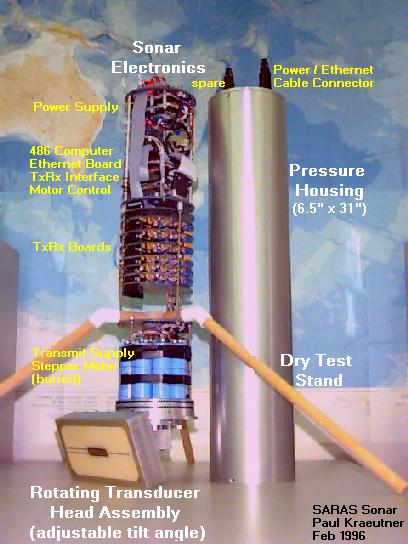
The figures below illustrate
the SARA Sonar setup and the effectiveness of this new sonar-imaging concept
during a recent experiment on Pavilion Lake. Figure 1. shows the SARA Sonar
configuration. Figure 2. is a photograph of the boat and experimental setup
used to obtain both a sidescan and 3D scan of a ridge.
|
|
|
|
|
Figure 1. SARA Sonar configuration |
Figure 2. A photograph of the boat and experimental setup used to obtain both a sidescan and 3D scan of a ridge |
Figure 3. The survey route across Pavilion Lake |

The sonar (SARA) was mounted over the side of the boat (transducer depth ~1m) and linked via Ethernet to a surface computer for control and data logging. 3D images of the bottom are generated by grouping bottom profiles obtained for a number of pings. Figure 3., shows the survey route across Pavilion Lake. 3D images of the bottom are generated by grouping bottom profiles obtained for a number of pings. Figure 4. shows an image of the survey route bottom using conventional 2D Sidescan. Figure 5. shows an image of the survey route bottom obtained with SARA Sonar, providing enhanced information on signal intensity, range, and elevation.
|
|
|
|
Figure 4. An image of the survey route bottom using conventional 2D Sidescan |
Figure 5. An image of the survey route bottom obtained with SARA Sonar, providing enhanced information on signal intensity, range, and elevation |
Additional survey routes
using the SARA Sonar can generate a 3D rendition of the bottom floor terrain
for feature base navigation for divers or underwater vehicles.
The concept of CAATI (signal processing methodology) and SARA can also be used
to form an accurate look-ahead sonar by reconfiguring the array along the
horizontal axis, with a variable tilt angle that can be adjusted to address
various platforms, and water depths.
For further information please contact:
John S. Bird, Professor
School of Engineering Science, Simon Fraser University
8888 University Dr., Burnaby, B.C. V5A 1S6 Canada
Tel. (604) 291-3824
Email: jbird@sfu.ca
Last updated: August 24, 2005