
The Laboratory for Robotic Vision
School of Engineering Science
Simon Fraser University
The extraction of 3D building geometric information from high-resolution electro-0optical imagery is becoming a key element in numerous geospatial applications. Indeed, producing 3D urban models is a requirement for a variety of applications such as spatial analysis of urban design, military simulation, and site monitoring of a particular geographic location. However, almost all operational approaches developed over the years for 3D building reconstruction are semi-automated ones, where a skilled human operator is involved in the 3D geometry modeling of building instances, which results in a time-consuming process. Furthermore, such approaches usually require stereo image pairs, image sequences, or laser scanning of a specific geographic location to extract the 3D models from the imagery.
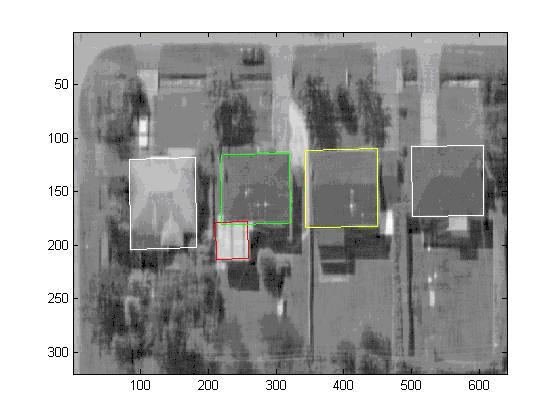
This research provides a framework for the automatic detection of buildings and the recovery of 3D geometric models from single monocular electro-optic imagery. The system detects rooftops and extracts their corresponding 3D building models from single airborne/spaceborne monocular imagery of real scenes. It is capable of processing the multi-sensor imaging of arbitrary viewpoint variations, clutter, and partial occlusion. Some preliminary results on monocular airborne and spaceborne images are shown in here.